大佬说自动驾驶都是“忽悠的”,专注港口的斯年智驾表示不服
2022-05-18 14:47 来源:斯年智驾
在飞速发展的时代,“新能源”“自动驾驶”俨然已经成为了汽车行业的竞争新高地。可万万没想到,有人会向这火热的领域泼了一盆冷水。

高精定位:为自动驾驶车辆解决“我在哪儿”的底层问题
自动驾驶的三大工作内容分别是感知、决策和执行。其中,感知的一个关键要素便是定位,高精度、高可靠性定位是车辆自动驾驶的先决条件,在自动驾驶全栈技术中占据着重要位置。高精度定位采用了多种传感器数据,通过融合等技术手段实现车辆的精确定位,为车辆解决“我在哪儿”的底层问题。
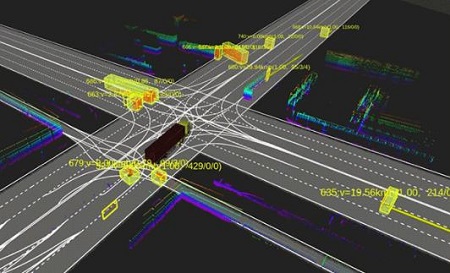
斯年智驾的高精定位采用了多传感器融合定位方案,包含GNSS+IMU+轮速+视觉定位+激光定位,通过多种传感器不同形式的观测,解决GNSS+IMU组合导航多径干扰、遮挡等难题。
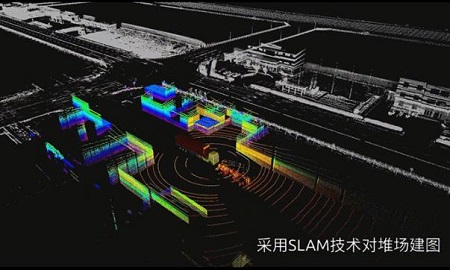
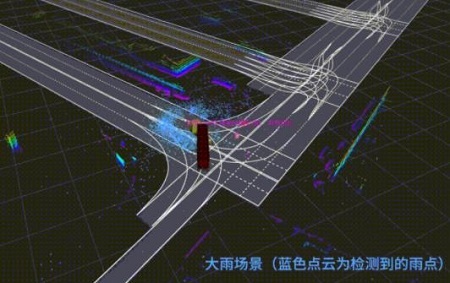
其中,GNSS成本较低,可以提供全天候、全天时、全范围下的绝对位置,但其也有着定位稳定性差、受环境影响较大的缺点;在GNSS信号受遮挡的区域,激光雷达便发挥作用,由于激光雷达的点云不受环境光照的影响,具有一定的穿透能力,因此能够在白天和黑夜等各种环境下,通过和地图匹配的方式,获取准确的观测;IMU可以在GNSS信号微弱的时候,让车辆继续获得绝对位置的信息,不至于“迷路”;视觉SLAM可以用在各种复杂且动态的场景,定位不会产生漂移,可以直接测量旋转和平移。
为了弥补单一传感器的局限,并提升定位系统在各种环境下的稳定性,斯年智驾将多种传感器结合,共同发挥作用,将测量信息一同提供给融合算法,进行融合计算。
自动驾驶技术在港口这样复杂场景的实际落地,考验的是一种组合、调整、应变的能力。为了得到更可靠的定位效果,斯年智驾在此基础上推出第二代自研SENIOR高精度定位模块——定海神针。
定海神针:优于5cm的高精度融合定位
定海神针目前已经可以稳定输出优于5cm的精确定位结果,领先于业界普遍的10cm精度。该定位模块采用独立模块形式,可独享信息处理单元,与其他外设(如显示器、4g通信模块、V2X设备等)相同,均通过专用通讯接口与核心计算单元相连,具备更高的灵活性,可高效降低多路径干扰的影响。

攻克自动驾驶核心技术,向全栈自研的目标迈进
毫无疑问,高精度定位是自动驾驶的底层技术,更是关键技术。实现了精准定位,才能逐步攻克自动驾驶的核心难题。无人驾驶技术是硬科技,更需要系统化的能力,来保证车辆的系统冗余、安全、稳定,从而推动无人驾驶技术走向批量化落地。
一项全新技术的出现,总是会经历一个循序渐进、不断革新的过程,无人驾驶从萌芽到成熟再到能够在世界范围内运用,离不开每一个自动驾驶人的不懈努力。如今,无人驾驶不再是遥不可及的“未来科技”,它解放了人类的双手,降低了发生交通事故发生的频率,为物流运输领域带来了颠覆性革命,已经成为真正会带来巨大商业前景和社会效益的“当下科技”。
斯年智驾也正在无人驾驶这条路上大步前进,时刻践行物流重卡无人驾驶渐进式落地的路线规划,一步一步实现自身的里程碑。
-
暂无记录