近日,经纬恒润和山东港口日照港集装箱发展有限公司共同申报的“顺岸开放式全自动化集装箱码头集卡无人驾驶关键技术研究和应用”获得2022年度中国港口协会科技进步奖一等奖。
此项目以全球首个顺岸开放式自动化集装箱码头为基础,经纬恒润在此项目中提供了包含了车、路、网、云、图等全栈无人集卡车队系统解决方案:车端基于线控底盘的自动驾驶整车SOA架构设计、车规级智能网联硬件、自动驾驶感知-规划-控制算法,路侧V2X车路协同系统,5G远程驾驶系统,云端车队调度管理系统FMS和数据后台、高精地图以及数字孪生,信息安全等整体解决方案,并将以上系统与港口既有业务和控制系统(TOS、ECS等)进行了数据对接和逻辑匹配,形成完整统一的无人水平运输生产运营系统。经过和日照港一年多共同攻关,本项目主要解决的问题和创新点如下:1.生产工艺方面,针对顺岸式码头水平运输路线交汇复杂性场景,提出了采用双悬臂内外集卡分离以及道闸分时隔离的工艺,保障有人外集卡和无人内集卡的安全混行和高效运行。 
2.无人驾驶稳定性方面,针对无人集卡重载震动大,作业时冲击大,以及无人集卡重载行驶过程中工控机稳定性不足等挑战,此项目采用了符合汽车质量标准的车规级高可靠的自动驾驶域控制器。 
3.网络安全性方面,针对集装箱码头复杂的电磁环境,以及由于大型港机设备对于5G信号形成的隧道效应造成的5G信号中断等问题,项目采用精准5G覆盖以及全场部署电磁干扰监测及寻源系统,保障5G通信链路安全可靠。 
4.精准定位方面,针对港口复杂环境下精准定位由于雨雪大雾等恶劣天气的影响,以及岸桥等港机对卫星定位信号的遮挡,项目部署了自研UWB高精定位系统,以及自建RTK定位服务和V2X及激光定位多种融合定位系统,实现2厘米以内定位精度,保障作业效率和安全。 
5.安全性方面,针对因无人集卡的非刚体连接重载时集装箱安全,项目开发了无人集卡挂车角度识别,可实现运行过程中的挂车姿态监测保障运行安全。同时开发了全场V2X行人入侵感知系统,保障全场运营安全性,通过5G远程驾驶接管一些极端场景,可保障全流程生产作业安全。 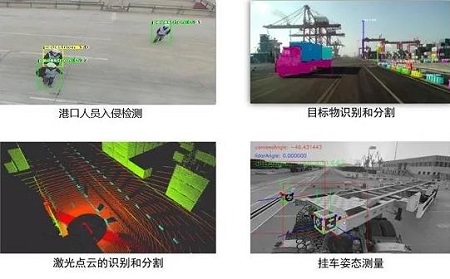
6.自动驾驶效率方面,针对如何避免“桥等车”等影响效率问题,以及确保最优行驶路线路径规划,项目开发了智能车队调度管理系统,首创无人集卡车和平板车混合调度,以及基于AI的箱体检测提前发现货物问题并处理,结合V2X和道闸的意图识别,提前抬杆,鱼贯通行,将外集卡纳入总体调度范围,多种技术综合提升总体作业效率。 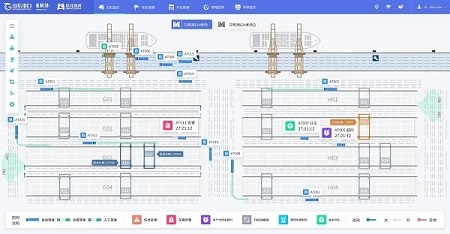

经纬恒润持续深耕港口无人驾驶领域,先后在唐山港、日照港、龙拱港落地运营无人驾驶项目。未来,经纬恒润将不断打磨产品和应用场景,继续为客户提供更高质量的产品和优质的服务,和客户共同致力于打造智慧港口、绿色港口的目标而努力!